企業情報COMPANY
協働ロボット用『スイッチングマググリッパー』
強い吸着力と薄板対応を両立できるマグネットグリッパー
概要
・『スイッチングマググリッパー』は、当社の『スイッチングマグホルダー』を使用した、磁力で磁性体を吸着・搬送する用途に利用する永電磁デバイス(マグネットグリッパー)です。
・ユニバーサルロボット社の協働ロボットの全サイズ(UR3e~UR30)に、適応可能なサイズバリエーションをご用意しています。 また、UR社以外の多くのメーカーの協働ロボットにも適用可能です。
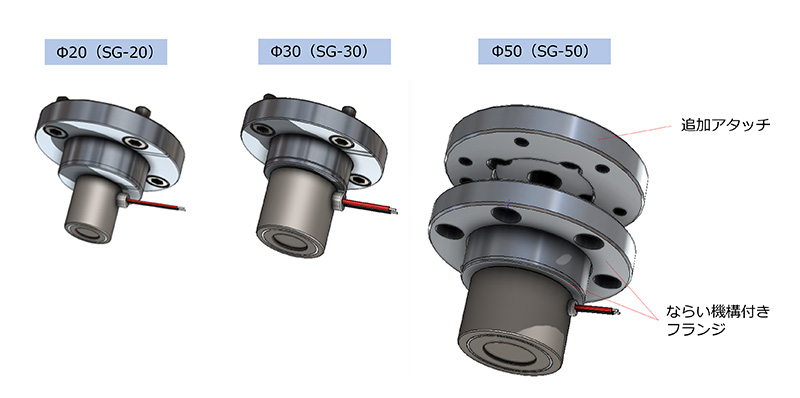 サイズバリエーションの適合表は以下のとおりです。
サイズバリエーションの適合表は以下のとおりです。
| 機種 | 可搬重量 | フランジサイズ(ねじ穴、P.C.D) | SG-20 | SG-30 | SG-50 |
|---|---|---|---|---|---|
| UR3e | 3kg | M6×4本 φ50 | ○ | ○ | ○追加アタッチで対応可 |
| UR5e | 5kg | ||||
| UR10e | 12.5kg | ||||
| UR16e | 16kg | ||||
| UR20 | 20kg | M8×4本 φ80 | × | × | ○ |
| UR30 | 30kg |
特長
『スイッチングマググリッパー』には、次の八つの優れた特長があります。
1. 操作性 コントローラを標準装備しており、ON/OFFの切り替えが簡単です。 2. 吸着力 非常に強力な吸着力を発揮します。 3. 薄板対応 薄い板でも強力な吸着力を発揮でき、1枚取り可能な範囲が拡がります。 4. ならい機構 吸着面がワークにならう機構を備えており、吸着・搬送の精度が上がります。 5. 安全性 電力供給が途切れても、ワークが落下する心配はありません。 6. 軽量コンパクト 全モデルが軽量設計のため、ロボットの実可搬重量が増加します。 7. 省電力 ON/OFF時のみに瞬間的に通電するため、非常に省電力です。 8. 静音性 エアを使用しないため、作業者と協働する環境に適しています。
1.操作性
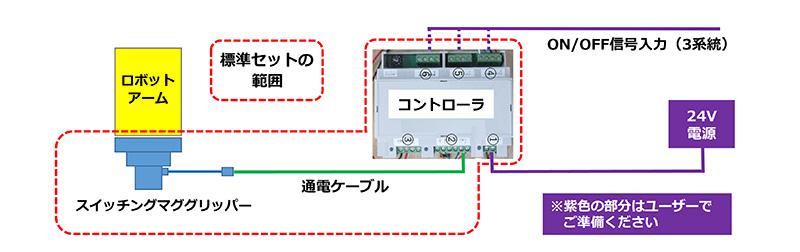
・『スイッチングマググリッパー』は、ON/OFFを簡単に切り替えられるようにコントローラを標準装備しています。 ワークを吸着するタイミング、離すタイミングで、ON/OFFの信号を入れていただくことでコントロール可能です。
・信号入力は、接点入力、5V入力、24V入力の3種類の中から、ご利用の環境に合わせて選択していただけます。
・また、ダイヤルで通電時間を変更できる機構を備えており、吸引吸着(※1)にも有効です。
・協働ロボットの標準コネクタなどを利用しない外付けタイプなので、様々な協働ロボットに適用可能です。
※1:吸着面とワークにギャップがある状態で、吸着をONにし、ワークを引き寄せ、吸着すること。 このとき、通電時間を通常より長く設定することで、より確実な吸着が可能になります。
以下のような製品構成になります。
2.吸着力
・『スイッチングマググリッパー』は、非常に強力な吸着力を発揮します。SG-20が80N、SG-30が200N、SG-50が800Nとなっています。 ・UR社の協働ロボットへの適合状況を下記の表にまとめました。 安全率を3として、ロボットのおよそ最大可搬重量まで取扱い可能か否かを示しています。 ・サイズバリエーションを使い分けることによって、全サイズの協働ロボットに適用可能となります。(※2) ※2:高い安全率が必要な運用環境では、下表の評価通りにならないケースもあると想定できます。
| 機種 | 可搬重量 | SG-20(80N) | SG-30(200N) | SG-50(800N) |
|---|---|---|---|---|
| UR3e | 3kg | ○ | ◎ | △ |
| UR5e | 5kg | × | ◎ | △ |
| UR10e | 12.5kg | × | × | ◎ |
| UR16e | 16kg | × | × | ◎ |
| UR20 | 20kg | × | × | ◎ |
| UR30 | 30kg | × | × | ○ |
◎:最大可搬重量まで対応可能 ○:最大可搬重量には対応していないが、一定の重量条件においては利用が可能 ×:対応不可 △:小さいサイズを推奨
3.薄板対応
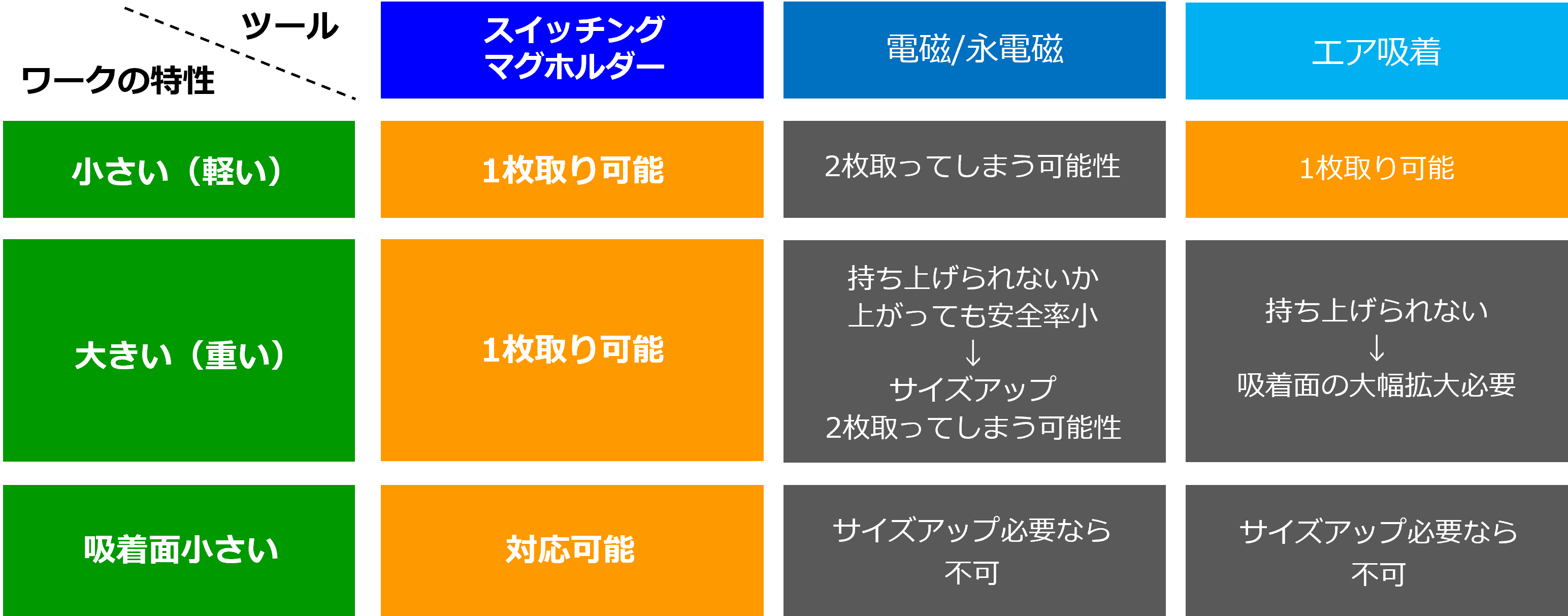
・『スイッチングマググリッパー』に利用されている『スイッチングマグホルダー』は、吸着面の直径の1/10の薄い板厚で最大吸着力を発揮できます。
(φ20で2mm、φ30で3mm、φ50で5mmのワーク板厚で最大吸着力を得られる)
・これは、競合製品の1/2~1/3の板厚で最大吸着力を出せることになり、大きな優位性があると言えます。
・この特長により、薄い金属板の『1枚取り』などの板金のハンドリングに利用いただくケースが増えています。
・競合する技術と比較表を作成すると、以下のようになります。
4.ならい機構
・協働ロボットがワークをつかむ際、吸着面がワークに完全に接するのは非常に難しく、安定した吸着力が得られないことがあります。 高価な協働ロボットは、吸着面をワークにならわせる機構を持っていますが、安価なものにはありません。 ・『スイッチングマググリッパー』は、ヘッドがワークに接した際にわずかに(最大3度)傾きを調整するならい機構を備えることで、協働ロボットの操作性と吸着力を向上させることができます。
5.安全性
・『スイッチングマググリッパー』は、瞬間通電で吸着状態になり、非通電でその状態を保持することができます。 ・そのため、ワークを吊り上げて搬送中に電力の供給が途絶えても、落下の危険がなく、安全です。
※本動画は「スイッチングマグホルダー」の停電時安全性デモですが、スイッチングマググリッパーにも共通する内容となっております。 ぜひ参考としてご覧ください。
6.軽量コンパクト
・『スイッチングマググリッパー』は非常に軽量なため、協働ロボットが実際に運べるワークの重量が増え、ロボットの能力を最大限に活用できます。 ・例えばSG-20 (φ20)は、質量が146gしかないので、可搬重量3kgのロボットで使用した場合、ワークに使える重量の割合は95%となり、極めて効率的な運用が可能となります。
| 品番 | 吸着力(N) | 質量(g)代表値 |
|---|---|---|
| SG-50 | 800 | 742 |
| SG-30 | 200 | 226 |
| SG-20 | 80 | 146 |
7.省電力
・『スイッチングマググリッパー』は、ON/OFFのタイミングのみ、0.1~0.2秒通電することで、吸着/釈放を行うことができるため、極めて省電力な製品となっています。 ・バッテリーのみで稼働させるようなケースでも、バッテリーに大きな負荷を与えないという特長があります。
8.静音性
・『スイッチングマググリッパー』は、 エアを使わず、24V電源のみで稼働するため、製品が騒音を出すことはありません。 ・協働ロボットの場合、人と近接する環境で稼働するケースが多いため、静音であることは優れた特長であると言えます。
仕様・寸法図

■仕様
| 品番 | 吸着力(N) | 吸着対象厚さ(mm) | 電圧(V) | 電流(A) | 最短通電時間(s) | 質量(g)代表値 |
|---|---|---|---|---|---|---|
| SG-50 | 800 | 5 | 24 | 0.92 | 0.2 | 742 |
| SG-30 | 200 | 3 | 24 | 0.44 | 0.1 | 226 |
| SG-20 | 80 | 2 | 24 | 0.60 | 0.1 | 146 |
※量産時には仕様を変更する可能性があります
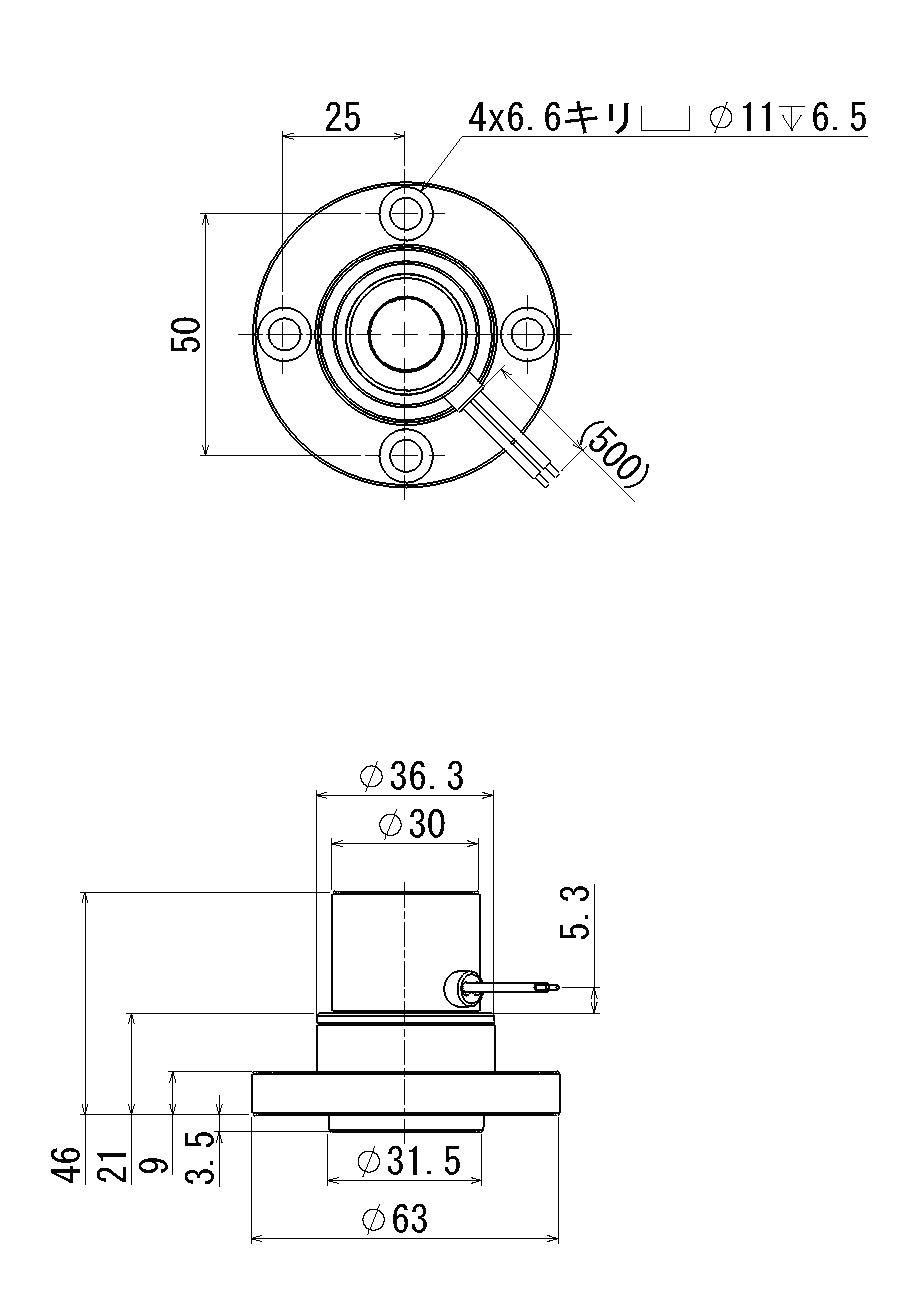
■寸法図
| SG-50 | SG-30 | SG-20 |
|---|---|---|
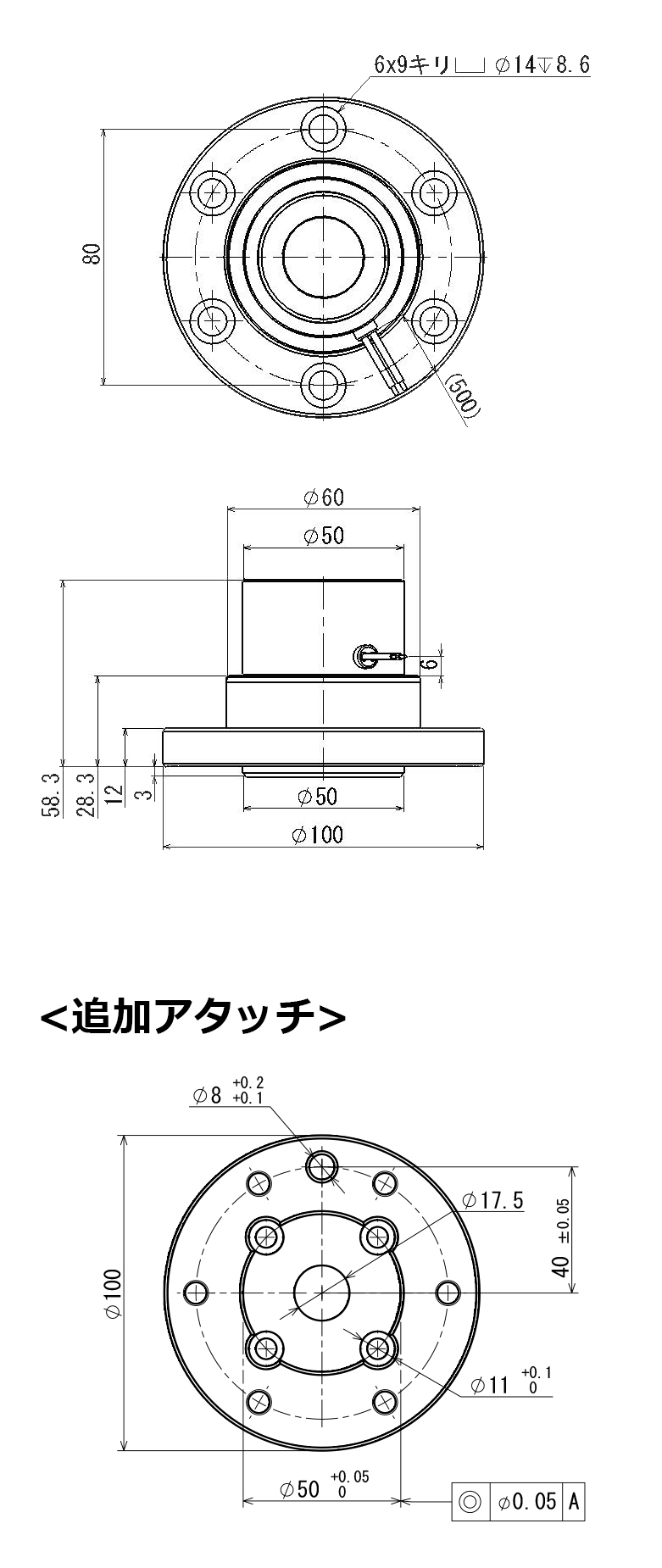 |
 |
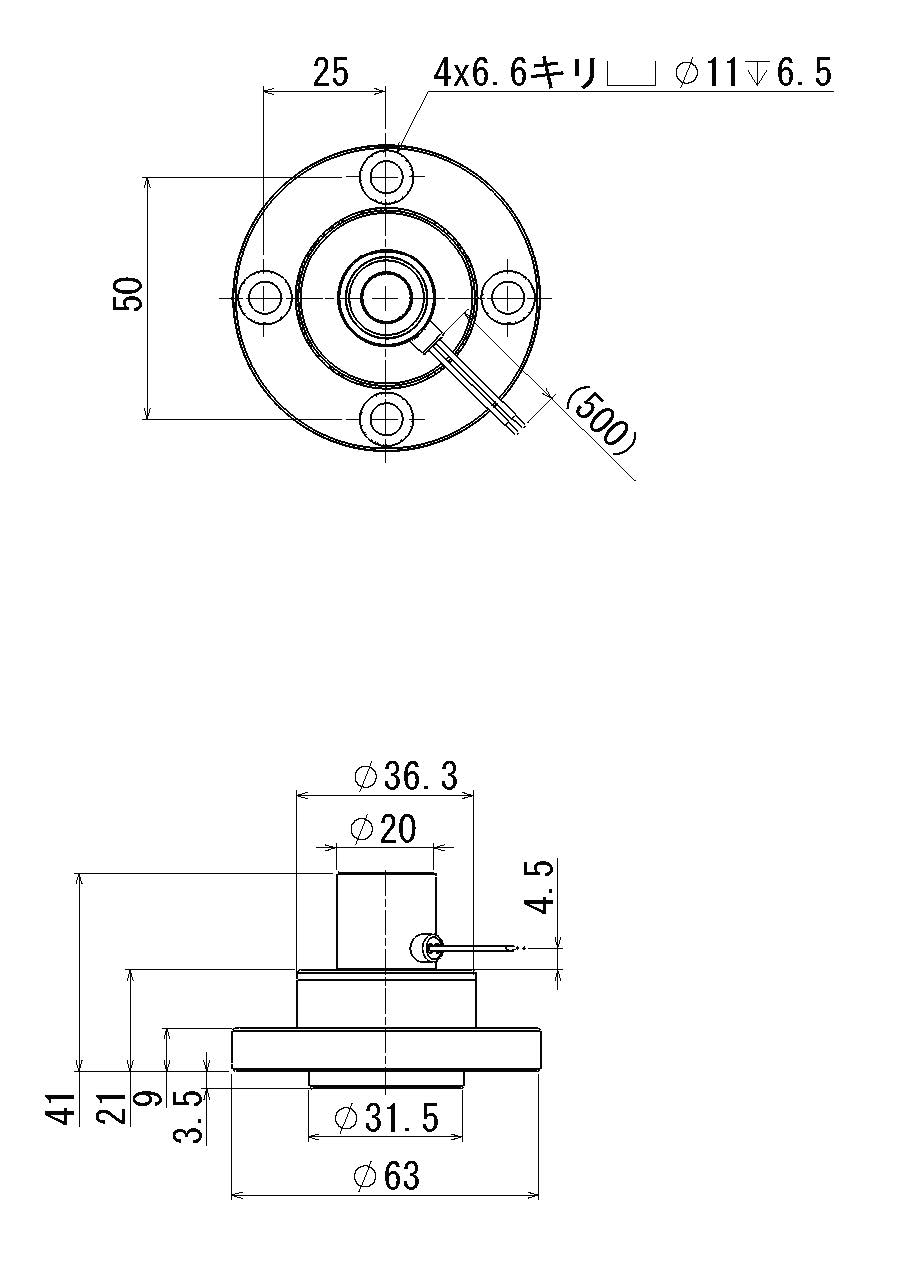 |